The voltage sag resulting from a fault is experienced not only by users on the faulted feeder, but also on the adjacent feeders, connected to the same distribution system. With the continuously increasing number of the renewable distributed energy resources being connected today to the electric power grid we need to think about the level and duration of the voltage sag and its impact on the DERs.
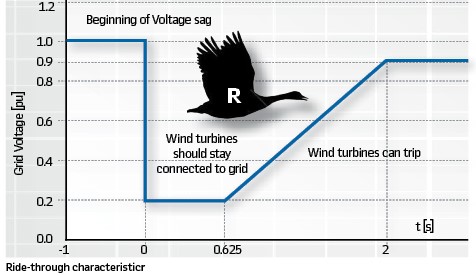
The figure shows the ride-through capability of the DER and demonstrates that the impact depends on two characteristics.
The first characteristic of a voltage sag – the depth – is a function of the type of fault, fault location and the system configuration. It will also be affected by the state of the distributed generator – if it is in service or not. Single phase-to-ground faults lead to voltage sag in the faulted phase and to voltage swell in the healthy phases. This is something that we can’t control, but we have to study in order to be able to predict or estimate the effects of different faults on the sensitive equipment.
The second characteristic of the voltage sag – its duration – is the parameter that we can control by properly applying the advanced features of multifunctional protection relays.
Conventional protection solutions will clear many of the faults without intentional time delay which will help keep the DERs in service during the duration of the fault. However, faults that are in zone 2 of the distance relays or outside of the instantaneous overcurrent protection reach will be cleared with time delays of hundreds of milliseconds or even second in some cases which may result in the tripping of many DERs. This is why today we need to look into expanding the use of communications-based solutions that will help us significantly reduce the fault clearing time. The problem with communication schemes is that they require a channel between the different protection devices which in the conventional applications can be quite expensive.
And here is where the routable GOOSE can help. Maybe some people may say that sending a message through a wide area without a predefined path will lead to a non-deterministic behavior. But even if the latency of the communication is 10s of milliseconds or even 100 milliseconds it will still be much faster than the time of Zone 2 of a distance function or an inverse time overcurrent protection element. The best part of it is that such solution is available for a minimal cost.
So, let’s embrace the R- GOOSE and start using it wherever we can.