by Edmund O. Schweitzer, III, Bogdan Kasztenny, Mangapathirao V. Mynam, Normann Fischer, Armando Guzman, Schweitzer Engineering Laboratories, USA
Fault current characteristics continue to change as more wind-powered generators and inverter-based sources are added to the electric power grid. The system fault response is not only different than in the days of large synchronous generators, but it also varies based on the source design and the utility grid code. We have three ways to tackle the rising protection challenges: fine-tune the present protective relays, enforce a better fault response of the sources, and use protection principles that are less dependent on the sources. This article shares our experience with transient-based line protection and shows how it helps solve today’s line protection challenges.
Speed has always been a key aspect of protection performance. Fast tripping minimizes equipment damage and risk to the system, personnel, and public.
Today’s time-domain and traveling-wave protective relays operate in 1 to 2 ms…about an order of magnitude faster than their predecessors. Characteristics of sources, CT saturation, and series compensation have little or no impact on the security.
Ideally, we want a protection element to respond based on a fault data window that is as short as possible (speed) and as rich in information as possible (selectivity). Traditionally, the longer the fault data window, the more information it contains.
Therefore, we typically work with a tradeoff between protection speed and selectivity. This is not necessarily so when unconventional sources dominate the fault current.
Unconventional sources challenge today’s phasor-based line protection elements. The key problems are related to low fault current and low inertia and affect directional and distance elements, faulted-phase identification, and remote backup protection. Waiting for the fault phasors to stabilize or adding an intentional time delay does not necessarily increase the amount of fault information available to the relay. To the contrary, the longer the protection scheme waits, the less clear the situation may become as the control algorithms of the sources respond to the fault conditions.
Transient-based line protection does not use speed for the sake of speed alone. It also uses speed to overcome problems and provide secure and dependable protection that is independent of the source characteristics.
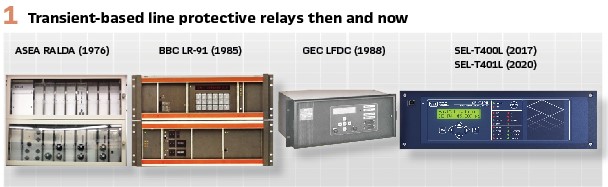
Transient-based Protection History
Transient-based protection responds to short-lived features in the relay input currents and voltages. Fault transients are not powered by the sources present in the system but by the energy stored in the system components prior to the fault: transmission lines, capacitor banks, reactors, and so on. To understand this key factor, think of a Thevenin equivalent network during faults. In the Thevenin network, all equivalent sources are removed, and their terminals are shorted. The change in voltage at the fault point is the only source and it drives all the incremental signals in the network. This independence of the fault signal components from physical sources has been appreciated in protective relaying for decades (Figure1), long before the days of wind-powered generators and inverter-based sources. It facilitates fast protection that is independent from the load and infeed effects.
From the protective relaying point of view, we can categorize fault-induced signals as follows:
- Traveling waves (TWs) are very steep changes in the voltage and current signals (transitions in the range of 1 to 5 μs). Launched by a fault, TWs are surges of electricity that propagate, reflect, and transmit throughout the network at nearly the speed of light. They eventually dissipate in a few milliseconds. We designate a line relay as a TW-based relay if it measures and responds to polarities, magnitudes, and time differences between individual TWs
- Fast incremental quantities are step changes in the voltage and current signals (transitions in the range of 1 to 2 ms). Fast incremental quantities do not separate individual TWs but effectively blend many TWs together. Using only 1 to 2 ms of data, fast incremental quantities are unaffected by the source response. In our relays, we refer to fast incremental quantities as time-domain (TD) quantities
- Fundamental frequency incremental quantities are changes in the voltage and current phasors. Low-inertia sources and inverter-based sources affect these quantities. Based on phasors, this type of incremental quantities is too slow to outrun the problematic behavior of unconventional sources
A transient-based line protective relay includes TW-based or TD-based protection elements. Presently, the known TW and TD protection elements and schemes for ac transmission lines are as follows:
- Directional elements (TW32 and TD32) for use in permissive pilot protection schemes
- Underreaching distance elements (TW21 and TD21)
- Traveling-wave differential scheme (TW87)
- Traveling-wave overcurrent element (TW50)
In the late 1970s, Vitins, Chamia, and Liberman proposed what is now known as the TD32 directional element. The same researchers introduced the TD21 element for direct tripping without the aid of a protection channel.
Their implementations (often mislabeled as TW-based protection) used high-pass filters to extract fault transients. The early implementations were restrained by the limitations of the technology available at the time (static relays). The original manufacturers did not follow through with new relays when the technology improved. Nonetheless, a handful of utilities used these early “traveling-wave” relays. After an initial period of fine tuning the filtering and settings, they served with a good track record until the last relays were decommissioned about a decade ago.
Also in the late 1970s, Takagi conceptualized what is now known as the TW87 scheme. The idea assumed high-speed sampling, high-bandwidth communications, and high-fidelity current and voltage transformers. His work was 40 years ahead of its time.
A practical TW87 scheme that does not require high-fidelity voltage transformers was first implemented in 2017.
In the early 1980s, Crossley and McLaren proposed the TW21 element. Unfortunately, the TW21 element remains an elusive goal in ac line protection. Refer to our in-depth discussion in the technical paper, “Distance Protection: Why Have We Started With a Circle, Does It Matter, and What Else Is Out There?”
Recently, we have introduced the TW50 element as an offshoot of the TW87 scheme in applications to lines terminating on transformers. When combined with the TD32 and TW32 elements, it allows sub-millisecond tripping without a protection channel.
Tripping before the sources know
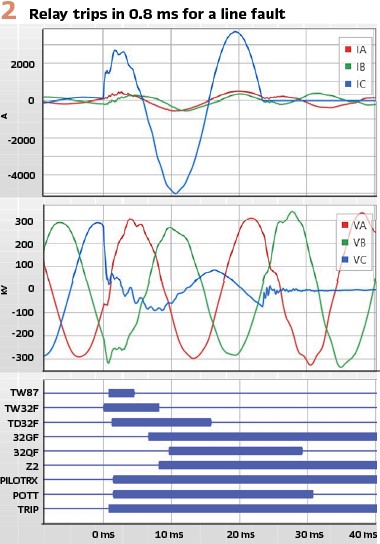
The best proof of source-independent protection operation is the timing of the trip command issued for an internal fault. Figure 2 shows the relay voltages, currents, the TRIP command, and key relay bits for a line fault on a 345 kV, 60 Hz line. The relay closed a trip-rated output contact in 0.8 ms. The TW87 scheme tripped first (0.8 ms) followed by the POTT scheme (1.4 ms). Both of these schemes use a direct fiber channel. During the 0.8 ms, the line current did not change much. It is self-evident that the TRIP command was not based on the fundamental frequency component of voltages and currents (source-dependent quantities). Instead, the TRIP command was based on transients that occurred between the fault inception and the moment of asserting the TRIP bit (source-independent quantities).
Sometimes, when looking at our field records that show a 1.5-cycle fault duration, the readers bring up the importance of including the breaker operating time in our simulations. This misunderstanding is understandable because in the past, we did not see this kind of line protection system operations. The field case in Figure 2 involves two-cycle SF6 breakers. Actuated in 0.8 ms (trip-coil current starts ramping up 0.8 ms into the fault), the breakers interrupted the current in 22.8 ms, for the unprecedented total fault clearing time of 23.6 ms.
Such very short relay operating times may bring doubts and suspicions of undesired operations. It is true that if the relay acted on phasors and attempted to measure these phasors in 2 to 3 ms, the results could be catastrophic. But this is not what transient-based relays do. Transient-based relays do not work on phasors but instead use an entirely different kind of information that is encoded in the first one or two milliseconds of the fault voltages and currents. Many individual pieces of transient information are much more reliable fault indicators than phasors.
Modern Implementations
Modern implementations of transient-based line protection principles are possible because of the following technologies:
- Fast sampling (1 Msps with 18 bits of true resolution)
- Abundant processing power (TW algorithms run every microsecond, and TD algorithms run every 100 μs)
- High-bandwidth low-latency fiber communications (sending 25 sets of 1 Msps voltages and currents every 25 μs)
- Reliable submicrosecond time synchronization over fiber
- Trip-rated solid-state outputs (10 μs closing time)
Modern transient-based relays are marvels of digital signal processing. For example, the SEL-T400L has a processing latency from the current change at the input terminals to the closure of the trip-rated output of just a fraction of a millisecond.
The low processing latency and the transient-based principles that require very short data windows permit an unprecedented operating speed.
Modern transient-based relays are not merely better copies of the early designs or theoretical concepts, but clean sheet of paper designs based on the same general principles with new insights, novelty, and attention to detail. The following key factors made these designs possible:
By virtue of being digital rather than analog, the new relays process the available information in a much more sophisticated way. Many more measurements and security conditions are possible when running explicit calculations as compared with using an analog circuit. For example, in addition to extracting a TW signal, the relay evaluates in real time how clean and reliable that TW signal is before using it for tripping
- By virtue of being digital rather than analog, the new relays include powerful self-monitoring, data redundancy, and cross-checking features that guard against noise and component failures
- By having abundant processing power, the new relays do not settle for simplifications, but perform signal processing following first principles. For example, the TD32 directional element is based on six fault loops rather than on the three voltage and current pairs
- Field experience gained through deployment of digital TW-based fault locators allowed better understanding of TWs and transients in secondary voltages and currents
- Better simulation tools allow more thorough validation testing
As a result, the new transient-based relays have an outstanding security record in the field, already supported by thousands of relay-years of service.
Performance
 |  |
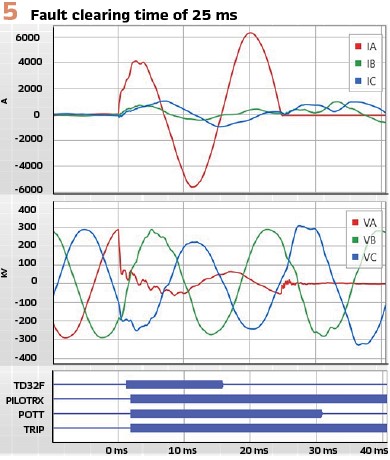 | 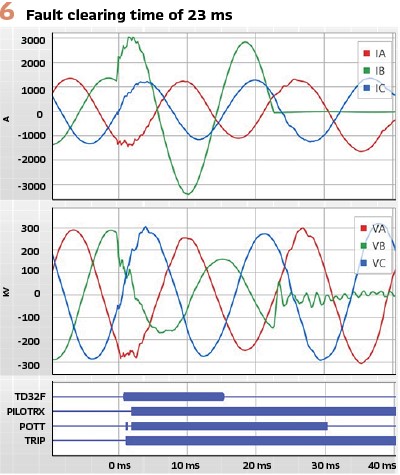 |
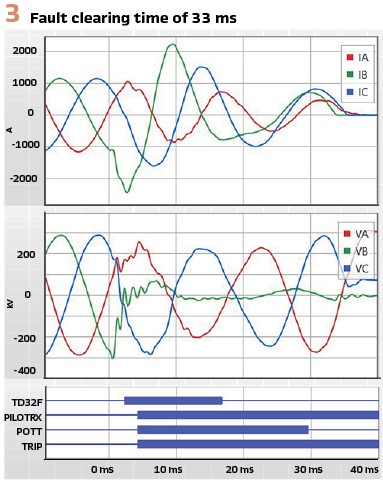
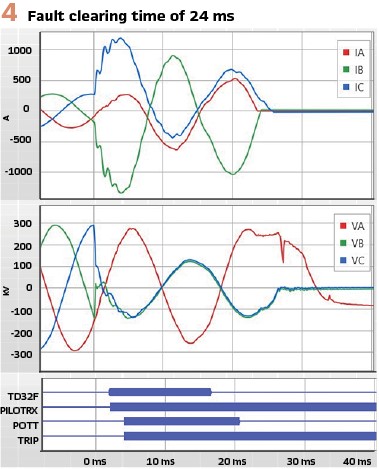
Our to-date field experience with the transient-based line relays leads us to the following observations (see Figures 3 through 6).
- The TW87 scheme is extremely fast and trips on the order of 1 ms (short lines) to 5 ms (very long lines). The operating speed is a strict function of the line length and the length of the associated fiber channel. Using TWs and a direct fiber channel, the TW87 scheme is the fastest line protection scheme possible. The TW87 scheme is satisfactorily dependable and performs especially well on long lines, including series-compensated lines
- The POTT scheme that uses the TW32 and TD32 directional elements is the workhorse of transient-based line protection. The scheme is extremely dependable and fast. The TW32 element is moderately dependable because of the poor frequency response of the present-day voltage transformers. When the TW32 element asserts, however, it operates in 0.1 ms regardless of the fault and system conditions. The TD32 element does all the heavy lifting and delivers dependability, security, and speed. The TD32 element typically operates in 1 to 2 ms. When used with a fast protection channel, such as direct fiber or a protection-grade low-latency multiplexer, the POTT scheme operates reliably and consistently in 2 to 4 ms
- The TD21 element is set to underreach the remote line terminal and trips directly without the protection channel in 3 to 5 ms. The TD21 element is designed to work only in strong systems and is satisfactorily dependable. In weak systems, such as when only unconventional sources drive the fault current, the TD21 element does not operate by design and therefore is not a valid option to address the wind-powered and inverter-based source challenge
- The faulted-phase identification logic performs exceptionally well, allowing for extremely fast single-pole tripping and reclosing. Identification of the faulted phase(s) in a time frame of 1 ms is not trivial because a fault generates transients in all three voltages and currents
Overall, the new transient-based relays perform remarkably well. They have an exceptional security record and an impressive dependability and speed record. When combined with two-cycle breakers and fast protection channels, transient-based relays clear the vast majority of line faults in 1.5 cycles.
Dependability and Backup
When we set out to design the modern transient-based relay, we focused on speed and security. Without security, nothing else matters in protective relaying. We accepted that we would obtain the level of dependability that was possible given the level of security that was required. The field experience exceeded our expectations for dependability. The customary concerns about TWs did not materialize. Only in a lab, faults happen at the voltage zero-crossing. In real life, the insulation must be stressed with some voltage before it breaks down. As a result, all practical faults launch TWs. The TW87 scheme and the TW32 element may lose some dependability because of the poor frequency response of the voltage and current transformers and other factors related to termination impedances and overlap of TWs. The TD32 element is fully independent on the fault point on wave and does not have any blind spots.
Considering the relative strengths and our field experience with the transient-based protection principles, we recommend applying transient-based relays as follows:
- When direct fiber is available, apply the TW87 scheme
- Use the POTT scheme with the TD32, 32G (zero-sequence directional), and Zone 2 elements. Optionally, use the TW32 element (requires a separate permissive bit in the protection channel). In traditional systems, use the 32Q (negative-sequence directional) element as well
- Apply the 87L (line current differential) scheme when possible. The 87L schemes provide extremely high sensitivity and dependability
- In strong systems, enable the TD21 element and the traditional Zone 1 element and set them to cover 70 to 80 percent of the line
- Use redundancy and breaker failure protection with direct transfer tripping (DTT) to reduce reliance on remote backup through step distance or overcurrent protection
- Strengthen your protection channel infrastructure to reduce latency and improve availability of unit protection schemes (TW87, POTT, 87L) and DTT
- When applying remote backup protection in weak systems with unconventional sources, consider using nondirectional offset distance characteristics with voltage-based faulted-loop selection
The above line protection package will allow you to trip for the majority of faults in less than a quarter cycle (assuming a fast protection channel) and will provide multiple layers of backup for line faults and out-of-zone faults in the system.
Summary
Transient-based line protection is a valuable tool for solving challenges related to wind-powered generators and inverter-based sources. Advancements in electronic components, fiber communications, time synchronization, processing power, and simulation tools allowed us to design high-performance relays that have worked exceptionally well from day one. Fault transients contain a wealth of information. They are short lived, and protection elements that use them require backup, but they are less affected by unconventional sources than the phasor-based protection elements and schemes, except the 32G element and the 87L scheme. Transient-based protective relays work well in strong and weak systems. They operate extremely fast. In strong systems, the speed limits damage and improves transient stability margins. In weak systems with unconventional sources, the speed allows outrunning problems related to the new sources, eases the fault ride-through requirements, and contributes to better stability, given that the new sources have low or no inertia.
By using transient-based line protection, we have practically eliminated the relay operating time from the fault clearing time equation. Circuit breakers become the next frontier for reducing fault duration. We are optimistic and looking forward to solid-state ac breakers.
In this article, we have referred to many concepts related to TWs and fast incremental quantities. For more information, refer to our many technical papers on transient-based line protection.
Biographies:
Edmund O. Schweitzer, III president and chief technology officer of Schweitzer Engineering Laboratories, Inc. (SEL), is recognized as a pioneer in digital power protection. In 1982, he founded SEL to develop and manufacture digital protective relays and related products and services for electrical power systems. Dr. Schweitzer is an IEEE Fellow, a member of the National Academy of Engineering, a recipient of the IEEE Medal in Power Engineering, and an inductee into the National Inventors Hall of Fame. He has written dozens of technical papers, has received four honorary doctorates, and holds over 200 patents
Bogdan Kasztenny specializes in power system protection and control. In his decade-long academic career, Dr. Kasztenny taught power system and signal processing courses and conducted applied research for several relay manufacturers. Since joining the industry in 1999, Bogdan has designed, applied, and supported protection, control, and fault-locating products, with their global installed base counted in thousands of installations. Bogdan is an IEEE Fellow, a Senior Fulbright Fellow, a Distinguished Member of CIGRE, and a registered professional engineer in the province of Ontario. Bogdan has authored over 220 technical papers and holds over 60 patents.
Mangapathirao (Venkat) Mynam
received his MSEE from the University of Idaho in 2003 and his BE in electrical and electronics engineering from Andhra University College of Engineering, India, in 2000. He joined Schweitzer Engineering Laboratories, Inc. (SEL) in 2003 and is presently working as an engineering director in SEL research and development. He was selected to participate in the U. S. National Academy of Engineering (NAE) 15th Annual U. S. Frontiers of Engineering Symposium. He is a senior member of IEEE and holds patents in the areas of power system protection, control, and fault location.
Normann Fischer received a BSEE with honors from the University of Cape Town in 1993, an MSEE from the University of Idaho in 2005, and a PhD from the University of Idaho in 2014. In 1999, Normann joined Schweitzer Engineering Laboratories, Inc., where he is currently a Distinguished Engineer and Vice President of Research and Development. He has authored and coauthored over 70 technical papers and 10 transactions papers. He has 28 patents related to electrical engineering and power system protection. He is currently a senior member of IEEE and a member of the American Society for Engineering Education (ASEE).
Armando Guzman received his BSEE with honors from Guadalajara Autonomous University (UAG), Mexico. He received a diploma in fiber-optics engineering from the Monterrey Institute of Technology and Advanced Studies (ITESM), Mexico, and his Master of Science and PhD in electrical engineering and master’s in computer engineering from the University of Idaho, USA. Since 1993, he has been with Schweitzer Engineering Laboratories, Inc. in Pullman, Washington, where he is a distinguished engineer. He holds numerous patents in power system protection, synchrophasor, and fault-locating technology. He is a senior member of IEEE.